
Safe Active Dynamics Learning and Control: A Sequential Exploration-Exploitation Framework
T. Lew, A. Sharma, J. Harrison, A. Bylard, M. Pavone
Published in T-RO - June 2022
[Paper] [Video] [More hardware results]

Safe deployment of autonomous robots in diverse scenarios requires agents that are capable of efficiently adapting to new environments while satisfying constraints. Guaranteeing constraints satisfaction is critical in many applications, e.g., for space robotics.
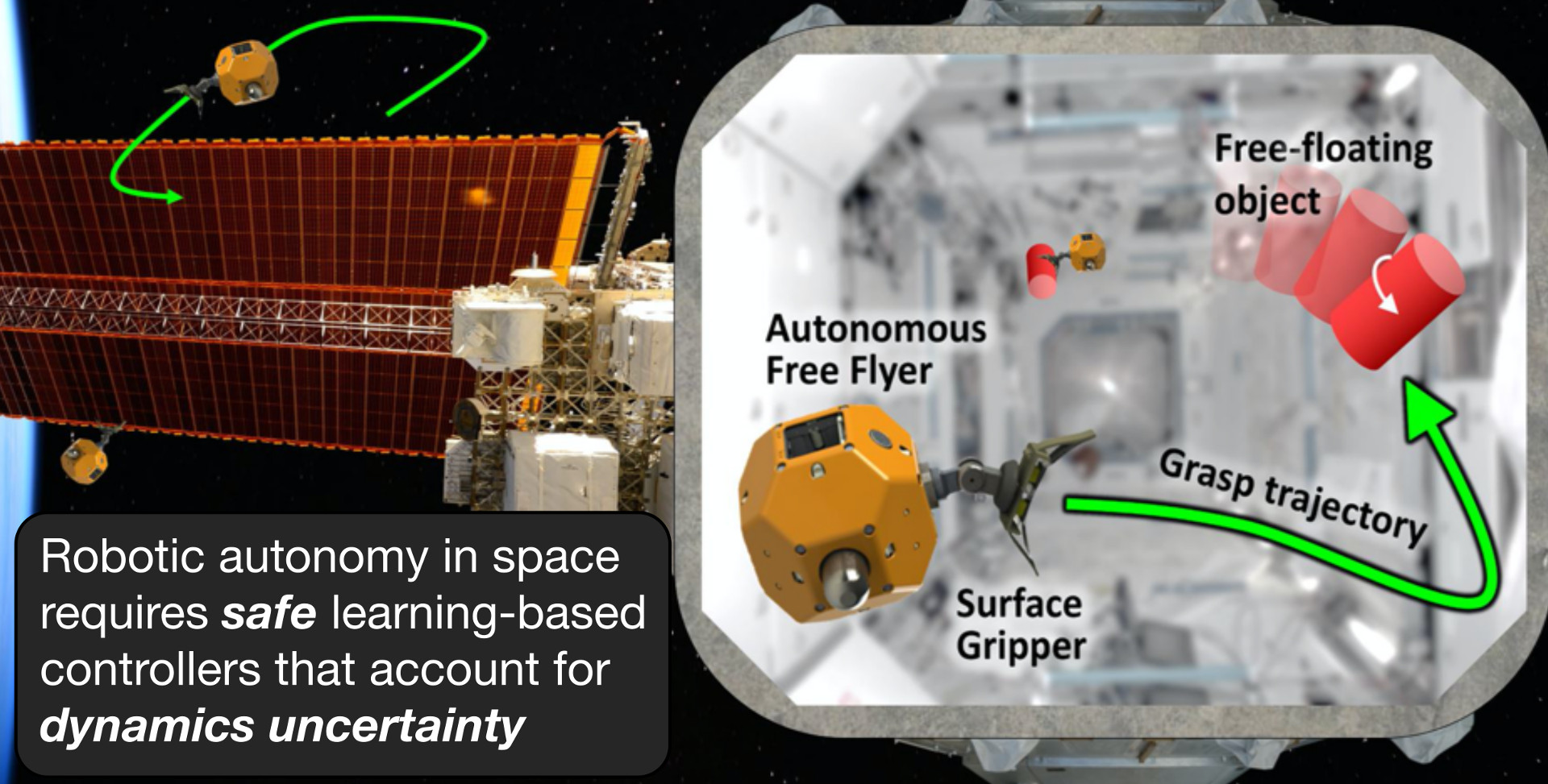
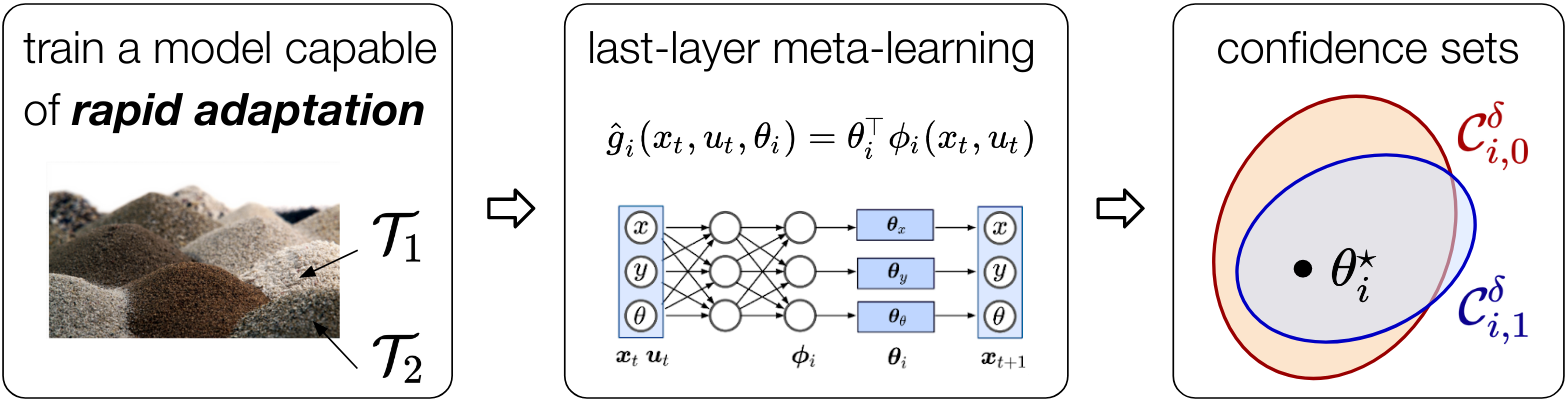
In this article, we propose a practical and theoretically justified approach to maintain safety in the presence of dynamics uncertainty. Our approach leverages Bayesian meta-learning with last-layer adaptation. The expressiveness of neural-network features trained offline, paired with efficient last-layer online adaptation, enables the derivation of tight confidence sets, which contract around the true dynamics as the model adapts online.
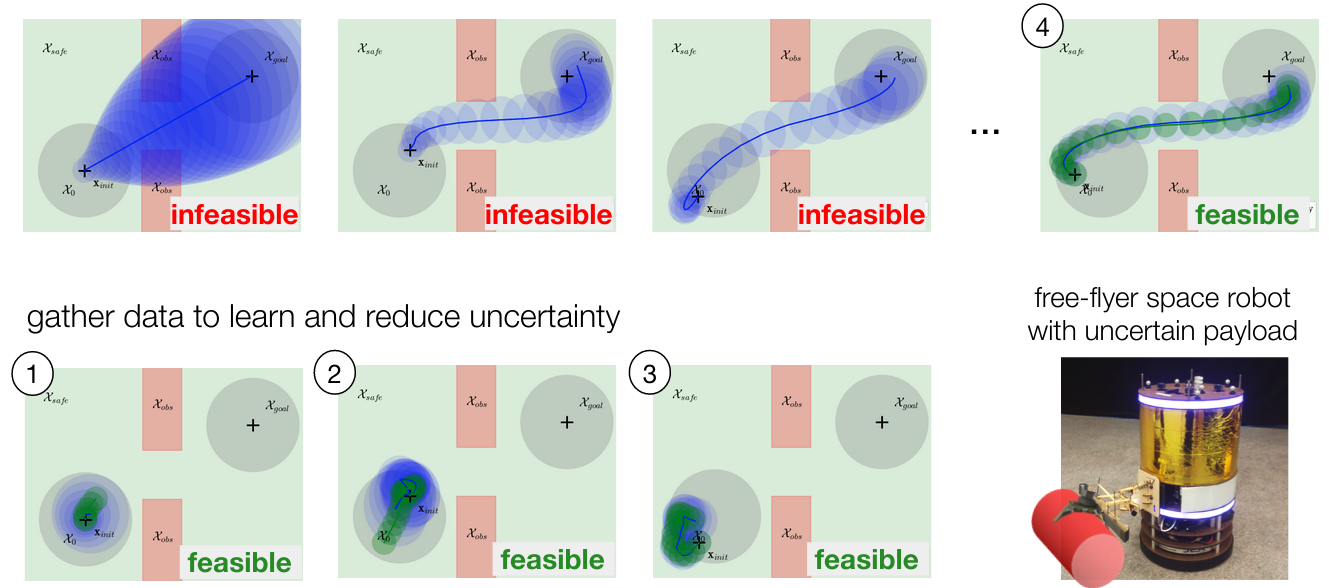
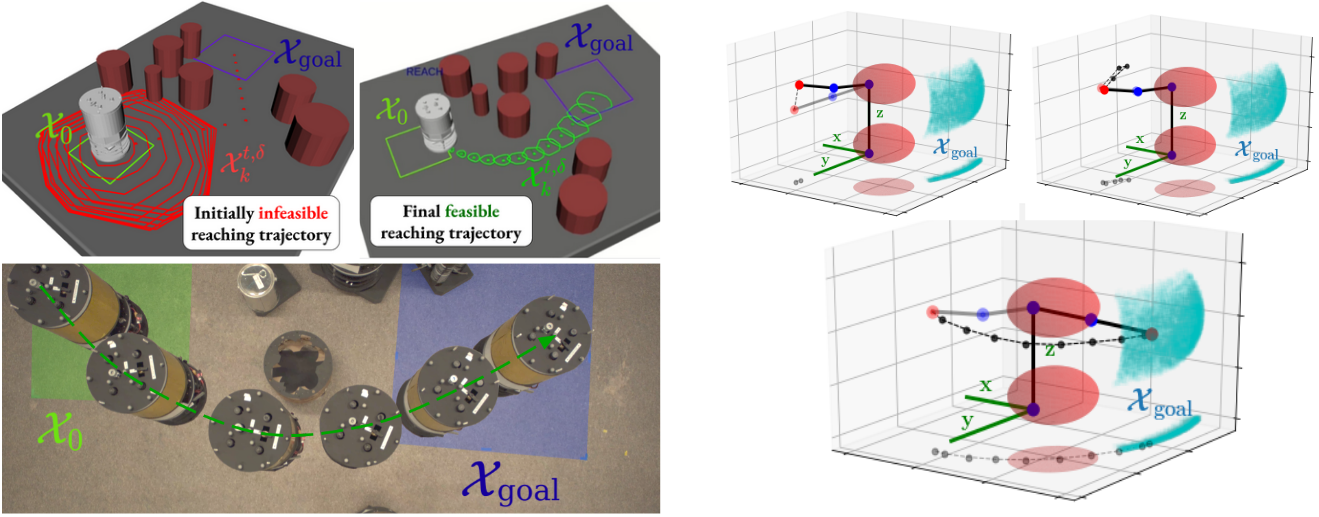
We exploit these confidence sets to plan trajectories that guarantee the safety of the system. Our approach handles problems with high dynamics uncertainty, where reaching the goal safely is potentially initially infeasible, by first exploring to gather data and reduce uncertainty, before autonomously exploiting the acquired information to safely perform the task.
Under reasonable assumptions, we prove that our framework guarantees the high-probability satisfaction of all constraints at all times jointly, i.e., over the total task duration. This theoretical analysis also motivates two regularizers of last-layer meta-learning models that improve online adaptation capabilities as well as performance by reducing the size of the confidence sets.
We extensively demonstrate our approach in simulation and on hardware.
Bibtex
@article{LewEtAl2022,
title={Safe Active Dynamics Learning and Control: A Sequential Exploration-Exploitation Framework},
author={Lew, T. and Sharma, A. and Harrison, J. and Bylard, A. and Pavone, M.},
journal={IEEE Transactions on Robotics},
volume = {38},
number = {5},
year = {2022},
pages = {2888--2907},
doi = {10.1109/TRO.2022.3154715},
}