
Contact Inertial Odometry: Collisions are your Friends
T. Lew*, T. Emmei*, D. Fan, T. Bartlett, A. Santamaria-Navarro, R. Thakker, A. Agha-mohammadi
Published in ISRR - December 2019
How can a drone autonomously fly with an IMU even if all its exteroceptive sensors have failed? This would greatly help autonomous exploration of unknown environments with aerial vehicles, which remains a challenge in perceptually degraded conditions (e.g. due to dust, fog, or a lack of visual or LiDAR-based features).
The problem looks intractable, since the state of the system is not observable with an IMU only. In this work, we take advantage of collisions with a collision-tolerant hybrid quadrotor.

We show that it is indeed possible to navigate in perceptually degraded conditions without any exteroceptive sensing. The key consists of exploiting collisions instead of treating them as constraints.
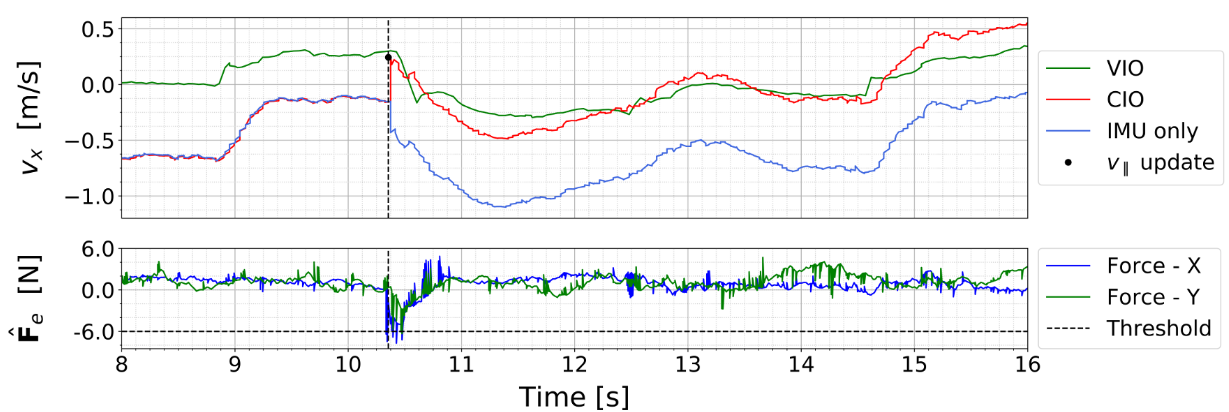
We present a contact-based inertial odometry (CIO) algorithm: it uses estimated external forces with the environment to detect collisions and generate pseudo-measurements of the robot velocity, enabling autonomous flight by updating velocity estimates using a kalman filter.
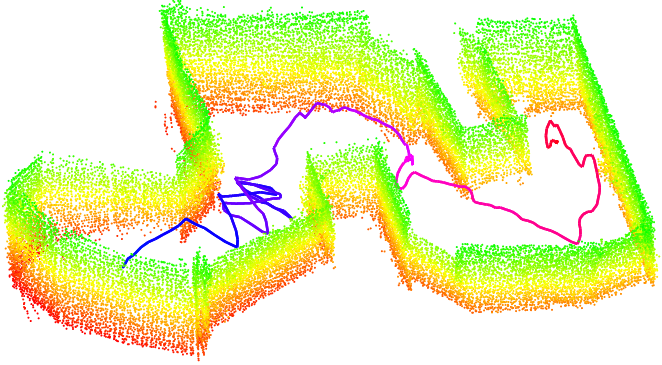
We also present a control and planning strategy exploiting contacts. All components of this framework are validated in hardware experiments and we demonstrate that a quadrotor can traverse a cluttered environment.
This work can be used on drones to recover from visual inertial odometry failure or on micro-drones that do not have the payload capacity to carry cameras, LiDARs or powerful computers.
Bibtex
@inproceedings{cio_2019,
title={Contact Inertial Odometry: Collisions are your Friends},
author={Lew, T. and Emmei, T. and Fan, D. and Bartlett, T. and Santamaria-Navarro, A. and Thakker, R. and Agha-mohammadi, A.},
booktitle={International Symposium on Robotics Research},
year = {2019},
}