
Chance-Constrained Optimal Altitude Control of a Rocket
T. Lew, F. Lyck, G. Müller
Published in EUCASS (2nd Best Student Paper Award in Flight Dynamics, GNC and Avionics) - July 2019
[Paper] [Launch Video] [ARIS website]
We propose a control algorithm for a rocket to accurately reach a target apogee altitude using actuated airbrakes. By designing the rocket to overshoot the target altitude and by braking by controlling the extension of the airbrakes, we can control the system to accurately stop at the desired apogee altitude.
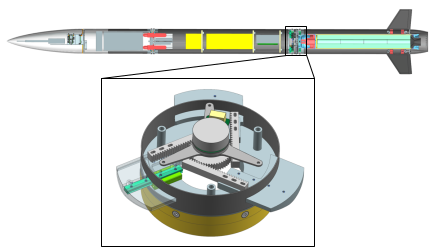
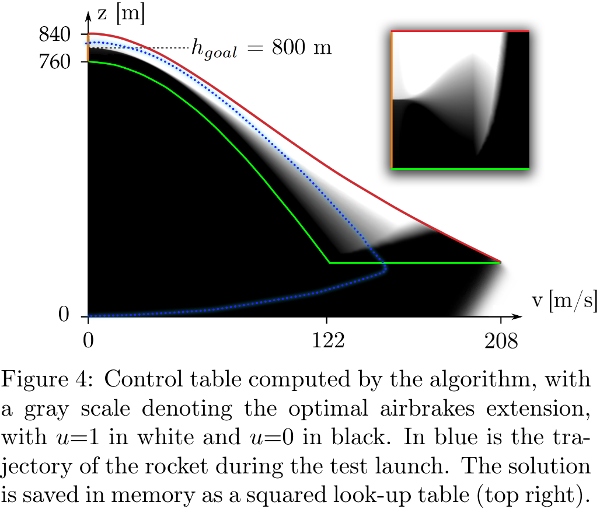
Our algorithm is simple to implement: on the ground before launch, a look-up control table is computed (using a chance-constrained value iteration algorithm described in the paper), and loaded onto the rocket’s memory. During the flight, control inputs for a given altitude and velocity are accessed, actuating the airbrakes to accurately stop at the target apogee altitude.
This algorithm flew on-board the first rocket built by the student-led rocketry team from ETH Zurich. Although the motor caused a failure 1.4s into the flight, our rocket won the Charles Hoult Award for Modeling & Simulation from the Experimental Sounding Rocket Association at the Spaceport America Cup in June 2018.
To verify the performance of our control algorithm, we later rebuilt a smaller-scale rocket and attempted another launch: our rocket successfully flew to a target altitude of 800m with an error of only 1%.
We published a paper about the algorithm at EUCASS in 2019 and received the 2nd best paper award in Flight Dynamics, GNC and avionics at the conference.
Abtract
Motivated by the problem of launching a rocket to reach a target apogee altitude, this paper presents an algorithm solving a chance-constrained infinite horizon optimal control problem. Using actuated airbrakes to control longitudinal drag forces, it minimizes the apogee altitude error while respecting input rate chance constraints. The effects of parameters uncertainty and disturbances are estimated using Monte Carlo simulations and incorporated in the problem. The solution is stored in memory as a look-up control table on a computationally limited rocket, which is successfully flown with an apogee altitude error of 1% for a target altitude of 800m.
Bibtex
@inproceedings{aris_eucass_rocket_2022,
title={Chance-Constrained Optimal Altitude Control of a Rocket},
author={Lew, T. and Lyck, F. and M\"{u}ller, G.},
booktitle={European Conference for Aeronautics and Aerospace Sciences},
year = {2022},
}