
Investigation of specific wheel-terrain interaction aspects using an advanced single wheel test facility
P. Oettershagen, T. Lew, A. Tardy, S. Michaud
Published in ASTRA - May 2019
[Paper]
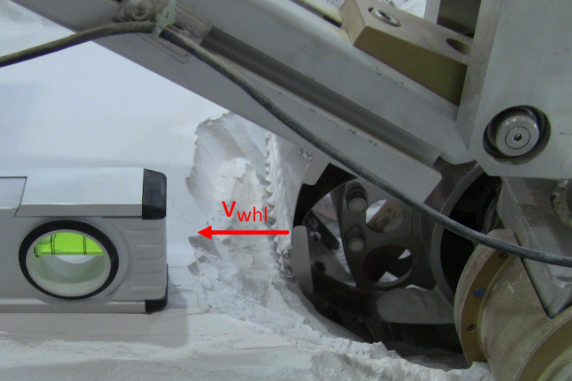
Successful planetary exploration rover missions require high locomotion performance and reliability. However, as experienced by NASA’s Mars Exploration Rovers, slip-sinkage events can cause complete immobilization. Accurate locomotion performance prediction via extensive soil-wheel interaction data can reduce such risks. Drawbar Pull (DP) vs. slip tests on Single Wheel Testbeds (SWT) are a common empirical means to collect such data. However, the current literature only covers a limited range of environmental conditions and is thus not fully representative. This paper therefore contributes novel methods and data generated with the RUAG Space SWT facility and the ExoMars Phase B2 wheel: First, drawbar pull measurements on ES-3 soil at negative slip are presented. This is important to assess failed and thus dragging wheels as well as downslope trajectories. It also allows interpolating DP values around 0% slip, which were previously not measurable. Second, a SWT facility that can measure drawbar pull at high slopes is presented. The measurements clearly show that on ES-2, the previous gradability predictions using zero- slope DP data already diverge at >8° slope. The inclined DP measurements are significantly more accurate. ExoMars BB2 rover tests confirm these findings. Both contributions can be used to increase the prediction accuracy of modern locomotion simulator frameworks.
Bibtex
@inproceedings{wheel_terrain_astra_2019,
title={Investigation of specific wheel-terrain interaction aspects using an advanced single wheel test facility},
author={Oettershagen, P. and Lew, T. and Tardy, A. and Michaud, S.},
booktitle={Symposium on Advanced Space Technologies in Robotics and Automation (ASTRA)},
year = {2019},
}