
Boundary Sampling to Learn Predictive Safety Filters via Pontryagin’s Maximum Principle
J. Dallas, T. Lew, J. Talbot, J. DeCastro, S. Bansal, J. Subosits
Published in Under Review - July 2026
[Paper]
Learned safety filters, e.g., using deep learning to approximate the solutions to HJB, are only as good as the data that they are trained on. While such learning-based tools scale to high-dimensional systems, their performance depends on informative data that includes states likely to lead to constraint violation, which can be difficult to efficiently sample in complex, high-dimensional systems.
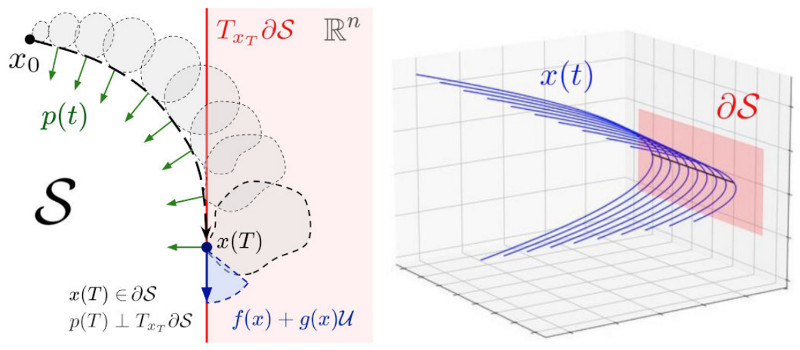
In this work, we leverage previous results using the Pontryagin Maximum Principle to characterize trajectories that barely avoid constraints violations, to guide data collection for learned Hamilton-Jacobi Reachability and concentrate learning efforts near safety-critical states to improve efficiency.
The learned Control Barrier Value Function is then used for safety filtering. Simulations and experimental validation on a shared-control automotive racing application demonstrate PMP sampling improves learning efficiency, yielding faster convergence, reduced failure rates, and improved safe set reconstruction.
