
TurboMPC: Fast, Scalable, and Differentiable Model Predictive Control on the GPU
G. Bravo-Palacios, J. Zhang, Z. Pestrikov, B. Plancher, T. Lew
Published in Under Review - July 2026
TurboMPC is a fast, scalable, and differentiable solver for model predictive control (MPC) that runs entirely on the GPU.
Scalable approaches have driven much of the progress in deep learning. Robotics is also increasingly powered by scale, via parallel simulation, large-scale policy learning, and neural networks used throughout the stack. We show that optimization-based MPC can scale on the GPU too, while keeping the structure, constraints, and inductive biases that make MPC useful in robotics.
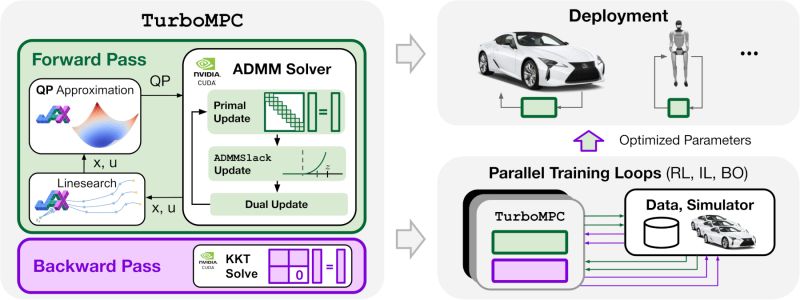
Because TurboMPC is differentiable and GPU-native, it can be used as a structured policy class inside learning pipelines such as reinforcement learning and imitation learning. The solver uses a JAX frontend and a CUDA backend, providing an easy-to-use interface while retaining the performance needed for online control and offline batched learning.
We deployed TurboMPC on a Lexus LC 500 for minimum-time racing, where GPU-batched Bayesian optimization enabled us to tune parameters and drive significantly faster. TurboMPC also enabled real-time replanning with very long horizons (>8000 discretization nodes), allowing it to anticipate multiple corners ahead.
The solver is open-source: https://github.com/ToyotaResearchInstitute/turbompc