
Thomas Lew
I am a research scientist at the Toyota Research Institute, where I develop decision-making algorithms for autonomous systems. My research leverages tools from optimal and stochastic control, optimization, differential geometry, and machine learning to design fast and reliable methods with optimality, accuracy, and adaptation guarantees. These algorithms have been deployed on cars, drones, spacecraft and Mars rover testbeds, rockets, and mobile manipulators.
Previously, I received my PhD from Stanford University advised by Marco Pavone and Riccardo Bonalli, completed research internships at Google Brain and NASA JPL, and studied at ETH Zurich and EPFL.
My Research
My work develops reliable and scalable decision-making algorithms for autonomous systems. Current directions include:
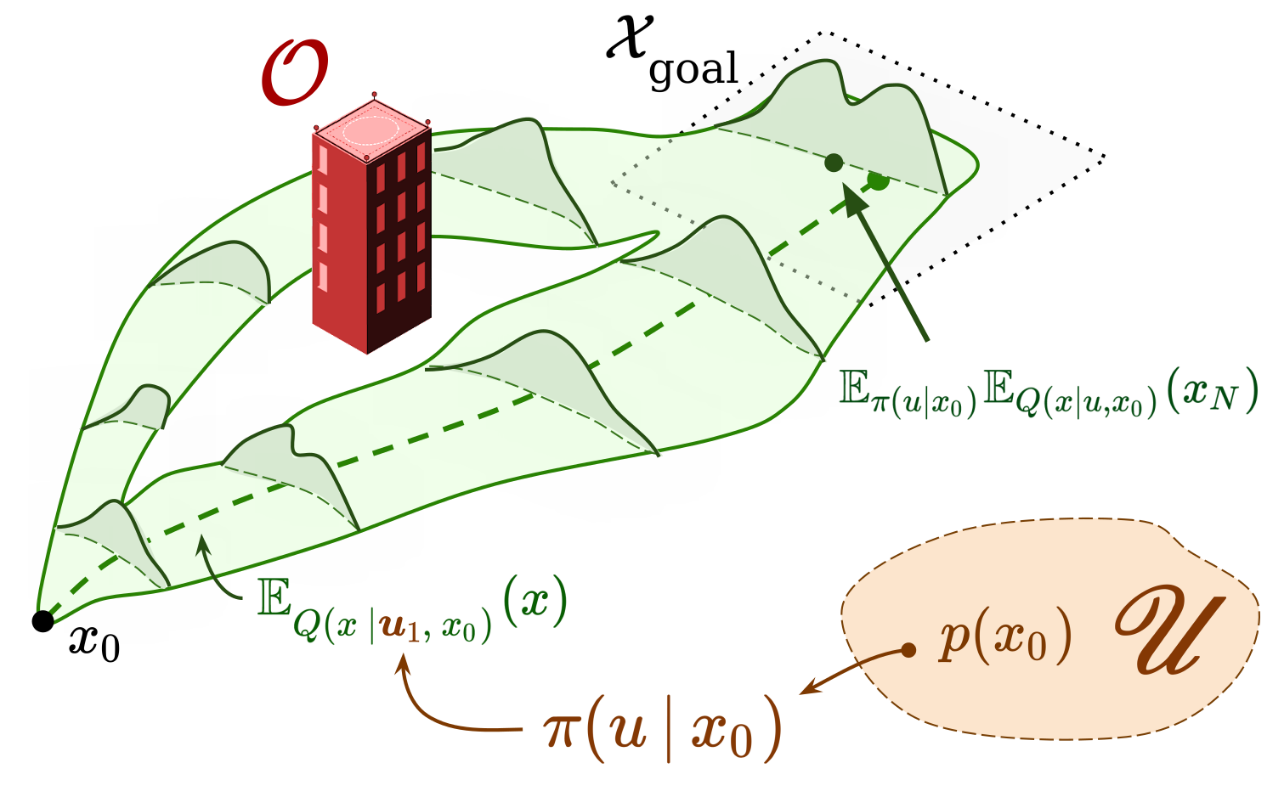
- Uncertainty-aware control: Methods that explicitly reason about uncertainty with optimality guarantees and robust performance, and theory that reveals low-dimensional solution structure in stochastic control to unlock faster algorithms.
- GPU-accelerated optimization: Differentiable solvers tailored to GPU parallelism, enabling fast uncertainty-aware MPC and scalable integration into reinforcement learning.
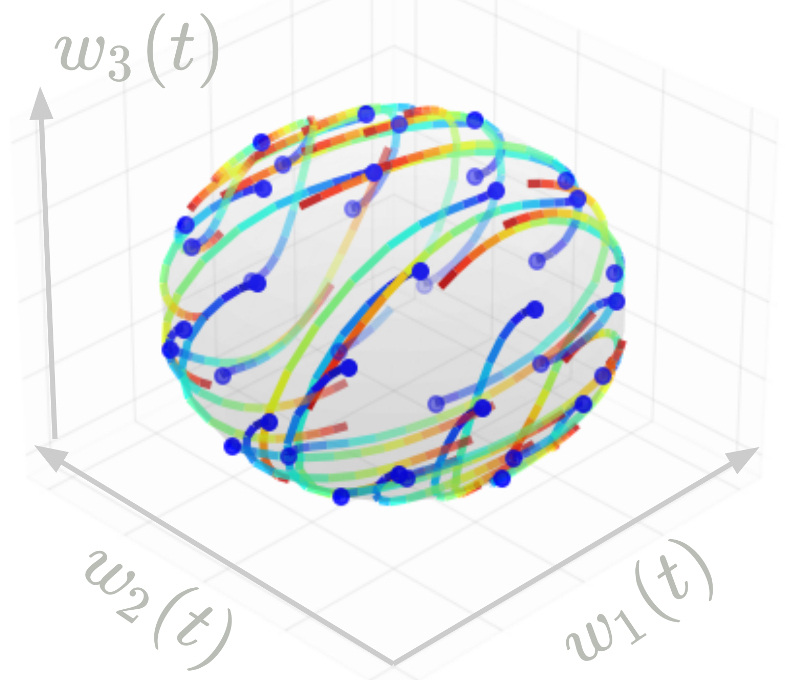
- Reachability & uncertainty propagation: Real-time tools for propagating uncertainty through nonlinear and neural network models, with provable accuracy and using low-dimensional characterizations of reachable sets.
- Reliable learning-based control: Safe and data-efficient algorithms to learn dynamics, balance exploration and exploitation, and achieve reliable learning-based control of unstable systems.
- Embodied autonomy: Algorithms enabling robust performance in challenging settings, such as drifting through puddles, perception-degraded flight and vision-based manipulation.
Preprints
 Vision-Conditioned Variational Bayesian Last Layer Dynamics Models - P. Brunzema, T. Lew, R. Zhang, T. Shirasawa, J. Subosits, M. Greiff - Under Review - 2026
Vision-Conditioned Variational Bayesian Last Layer Dynamics Models - P. Brunzema, T. Lew, R. Zhang, T. Shirasawa, J. Subosits, M. Greiff - Under Review - 2026 Project Page / Paper / Video - A vision-conditioned dynamics model.
Publications
 Differentiable Model Predictive Control on the GPU - E. Adabag, M. Greiff, J. Subosits, T. Lew - ICLR - 2026
Differentiable Model Predictive Control on the GPU - E. Adabag, M. Greiff, J. Subosits, T. Lew - ICLR - 2026 Project Page / Paper / Code / Video - Scaling up differentiable optimization on the GPU.
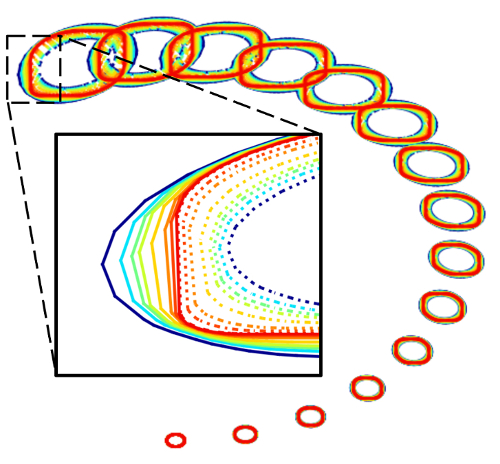 Convex Hulls of Reachable Sets - T. Lew, R. Bonalli, M. Pavone - TAC - 2025
Convex Hulls of Reachable Sets - T. Lew, R. Bonalli, M. Pavone - TAC - 2025 Project Page / Paper / Code - We study the structure of convex hulls of reachable sets of nonlinear systems (dx/dt=f(x)+g(x)w).
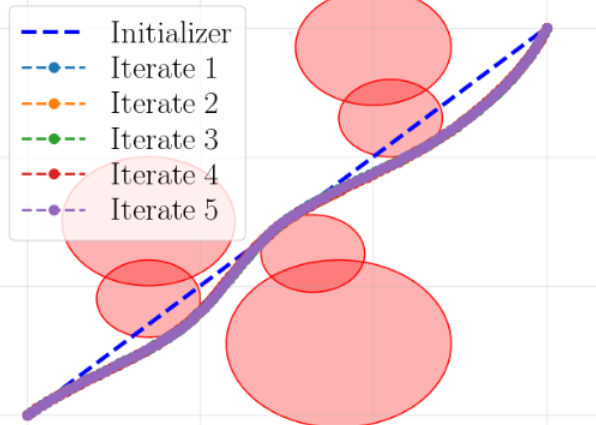
 Rough Stochastic Pontryagin Maximum Principle and an Indirect Shooting Method - T. Lew - SICON - 2025
Rough Stochastic Pontryagin Maximum Principle and an Indirect Shooting Method - T. Lew - SICON - 2025 Project Page / Paper / Code / Summary - We derive new optimality conditions and an indirect method for stochastic optimal control.
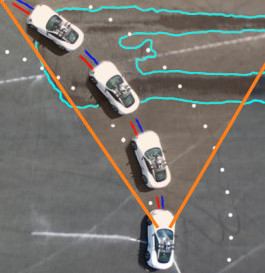
 First, Learn What You Don’t Know: Active Information Gathering for Driving at the Limits of Handling - A. Davydov, F. Djeumou, M. Greiff, M. Suminaka, M. Thompson, J. Subosits, T. Lew - RA-L - 2025
First, Learn What You Don’t Know: Active Information Gathering for Driving at the Limits of Handling - A. Davydov, F. Djeumou, M. Greiff, M. Suminaka, M. Thompson, J. Subosits, T. Lew - RA-L - 2025 Project Page / Paper - Unstable systems are difficult to simultaneously learn and control.
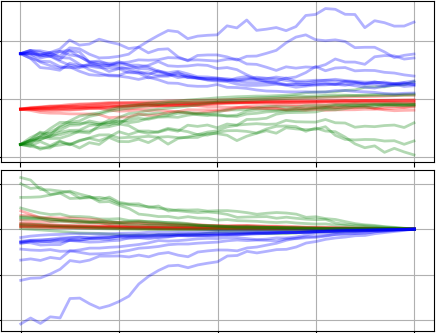
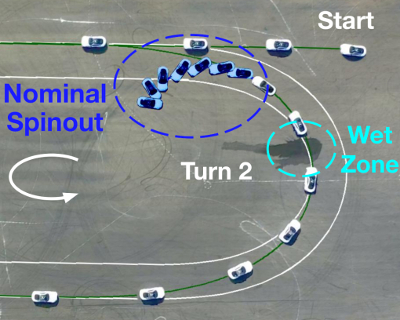 Risk-Averse Model Predictive Control for Racing in Adverse Conditions - T. Lew, M. Greiff, F. Djeumou, M. Suminaka, M. Thompson, J. Subosits, - ICRA - 2025
Risk-Averse Model Predictive Control for Racing in Adverse Conditions - T. Lew, M. Greiff, F. Djeumou, M. Suminaka, M. Thompson, J. Subosits, - ICRA - 2025 Project Page / Paper - A risk-averse controller that can reason over uncertainty.
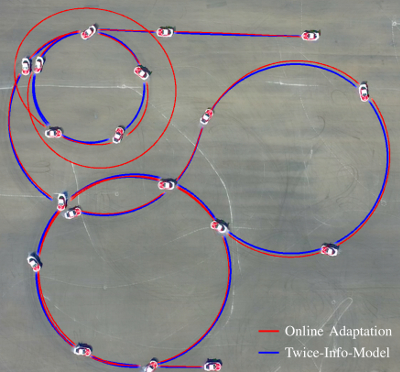
 One Model to Drift Them All: Physics-Informed Conditional Diffusion Model for Driving at the Limits - F. Djeumou, T. Lew, N. Ding, M. Thompson, M. Suminaka, M. Greiff, J. Subosits - CoRL - Outstanding Paper Award - 2024
One Model to Drift Them All: Physics-Informed Conditional Diffusion Model for Driving at the Limits - F. Djeumou, T. Lew, N. Ding, M. Thompson, M. Suminaka, M. Greiff, J. Subosits - CoRL - Outstanding Paper Award - 2024 Project Page / Paper - A multimodal diffusion-based vehicle model for MPC.
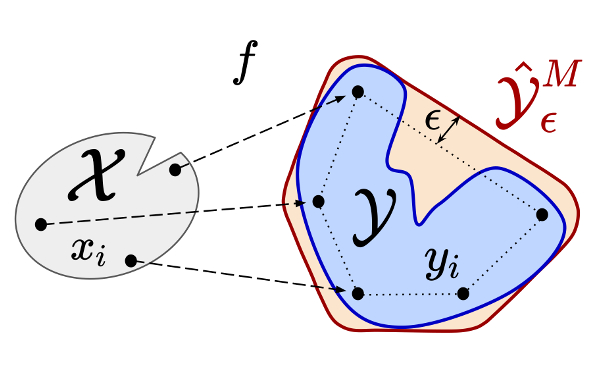
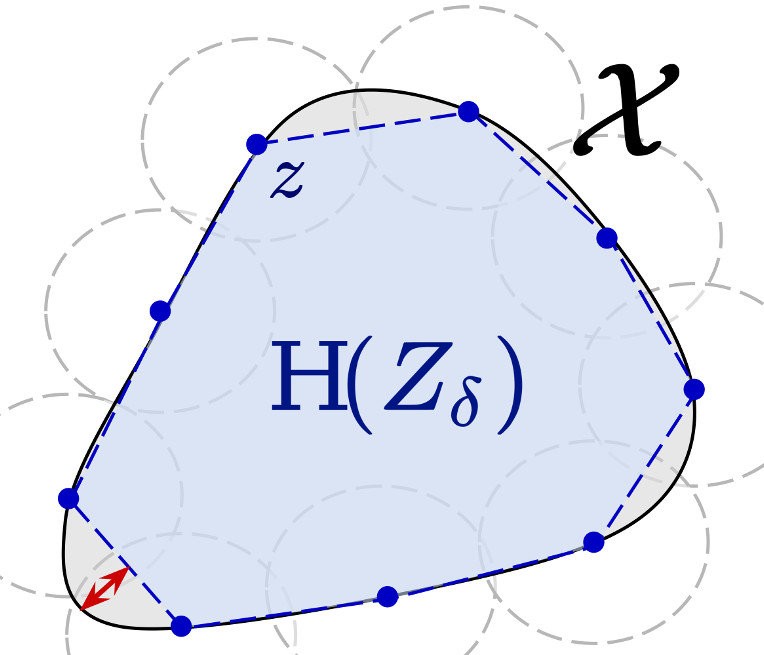 Estimating the Convex Hull of the Image of a Set with Smooth Boundary: Error Bounds and Applications - T. Lew, R. Bonalli, L. Janson, M. Pavone - DCG - 2024
Estimating the Convex Hull of the Image of a Set with Smooth Boundary: Error Bounds and Applications - T. Lew, R. Bonalli, L. Janson, M. Pavone - DCG - 2024 Project Page / Paper / Code - We study the problem of estimating the convex hull of the image of a compact set with smooth boundary.
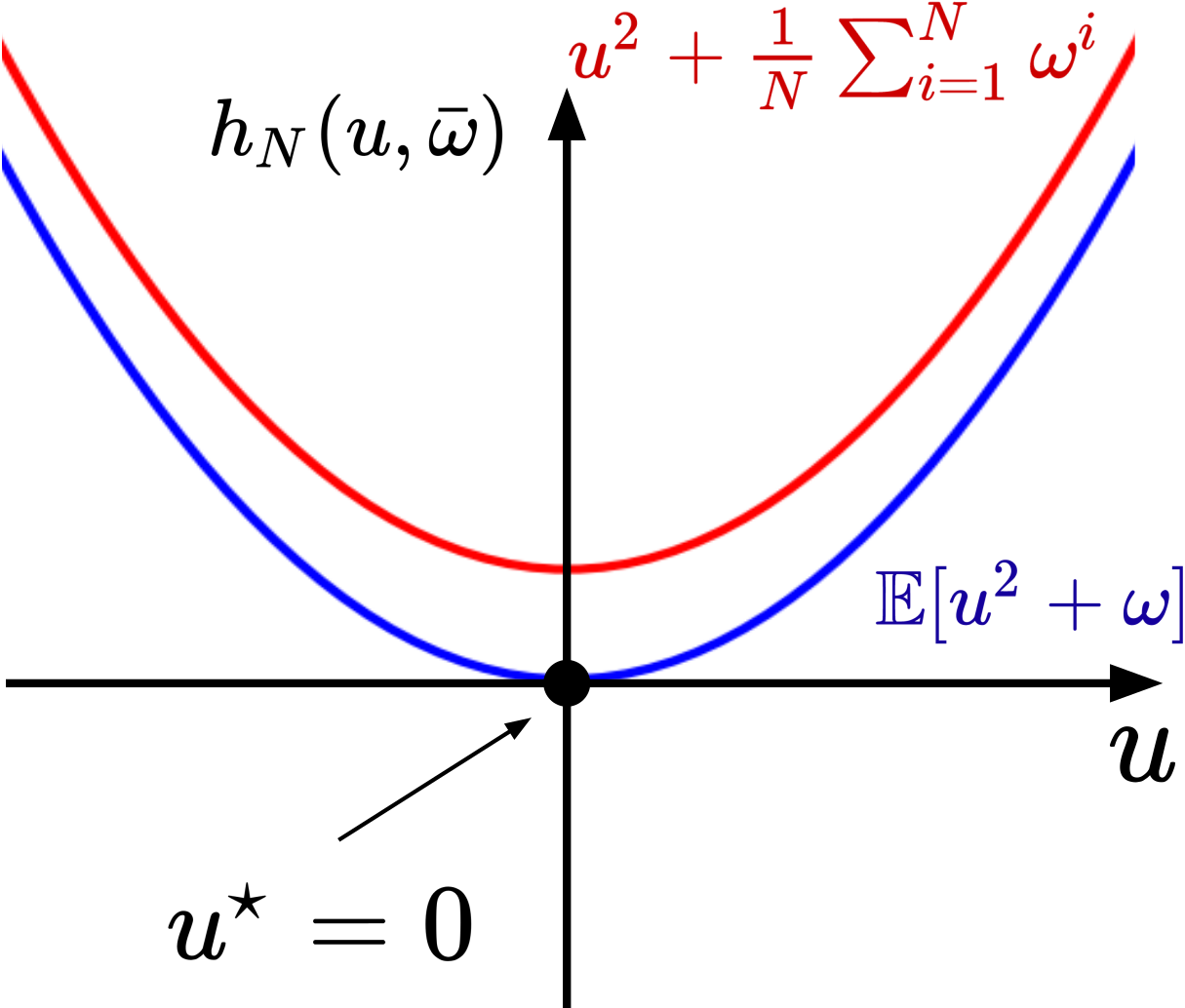 Sample Average Approximation for Stochastic Programming with Equality Constraints - T. Lew, R. Bonalli, M. Pavone - SIOPT - 2024
Sample Average Approximation for Stochastic Programming with Equality Constraints - T. Lew, R. Bonalli, M. Pavone - SIOPT - 2024 Project Page / Paper / Code - We revisit the sample average approximation (SAA) approach for general non-convex stochastic programming and apply the method to stochastic optimal control problems.
 Exact Characterization of the Convex Hulls of Reachable Sets - T. Lew, R. Bonalli, M. Pavone - CDC - Outstanding Student Paper Award - 2023
Exact Characterization of the Convex Hulls of Reachable Sets - T. Lew, R. Bonalli, M. Pavone - CDC - Outstanding Student Paper Award - 2023 Project Page / Paper / Presentation / Code - We give a finite-dimensional characterization of the convex hulls of reachable sets of nonlinear systems (dx/dt=f(x)+w).
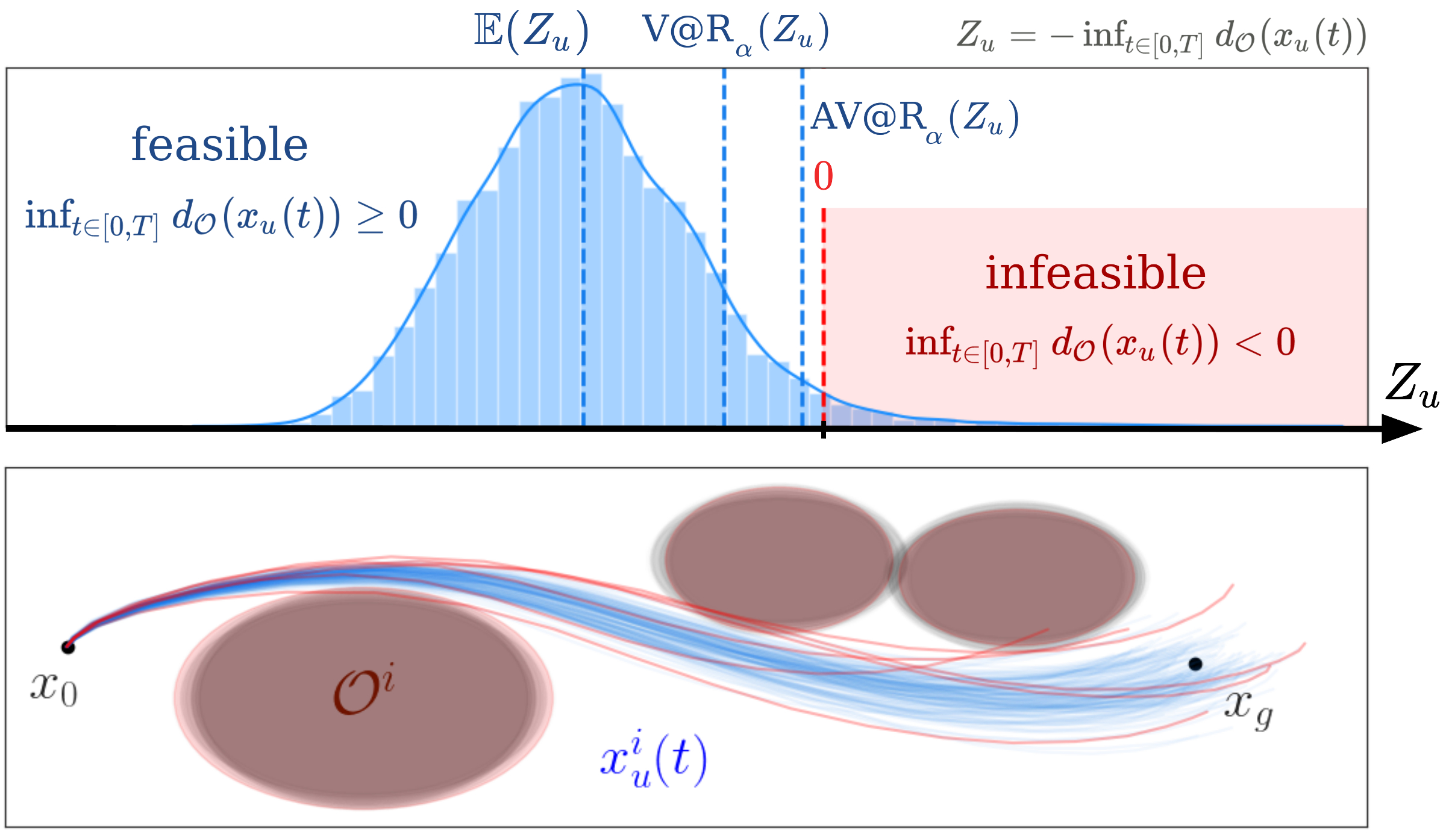 Risk-Averse Trajectory Optimization via Sample Average Approximation - T. Lew, R. Bonalli, M. Pavone - RA-L - 2023
Risk-Averse Trajectory Optimization via Sample Average Approximation - T. Lew, R. Bonalli, M. Pavone - RA-L - 2023 Project Page / Paper / Code - A sample-based approach to risk-averse trajectory optimization.
 Robotic Table Wiping via Reinforcement Learning and Whole-body Trajectory Optimization - T. Lew, S. Singh, M. Prats, J. Bingham, J. Weisz, B. Holson, X. Zhang, V. Sindhwani, Y. Lu, F. Xia, P. Xu, T. Zhang, J. Tan, M. Gonzalez - ICRA - 2023
Robotic Table Wiping via Reinforcement Learning and Whole-body Trajectory Optimization - T. Lew, S. Singh, M. Prats, J. Bingham, J. Weisz, B. Holson, X. Zhang, V. Sindhwani, Y. Lu, F. Xia, P. Xu, T. Zhang, J. Tan, M. Gonzalez - ICRA - 2023 Project Page / Paper / Blog Post / Video - We propose an effective strategy for table wiping combining the strengths of reinforcement learning and whole-body trajectory optimization.
 Sequential convex programming for non-linear stochastic optimal control - R. Bonalli, T. Lew, M. Pavone - ESAIM: COCV - 2022
Sequential convex programming for non-linear stochastic optimal control - R. Bonalli, T. Lew, M. Pavone - ESAIM: COCV - 2022 Project Page / Paper / Code - We propose a sequential convex programming framework for non-linear finite-dimensional stochastic optimal control.
 Convex Optimization for Trajectory Generation: A Tutorial on Generating Dynamically Feasible Trajectories Reliably and Efficiently - D. Malyuta, T. Reynolds, M. Szmuk, T. Lew, R. Bonalli, M. Pavone, B. Açıkmeşe - CSM - Outstanding Paper Award - 2022
Convex Optimization for Trajectory Generation: A Tutorial on Generating Dynamically Feasible Trajectories Reliably and Efficiently - D. Malyuta, T. Reynolds, M. Szmuk, T. Lew, R. Bonalli, M. Pavone, B. Açıkmeşe - CSM - Outstanding Paper Award - 2022 Project Page / Paper / Code - A comprehensive tutorial on convex trajectory optimization.
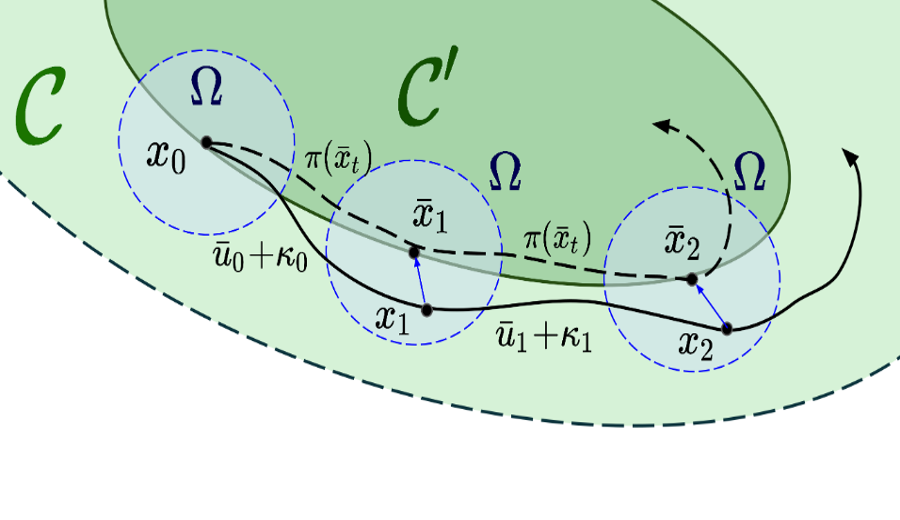
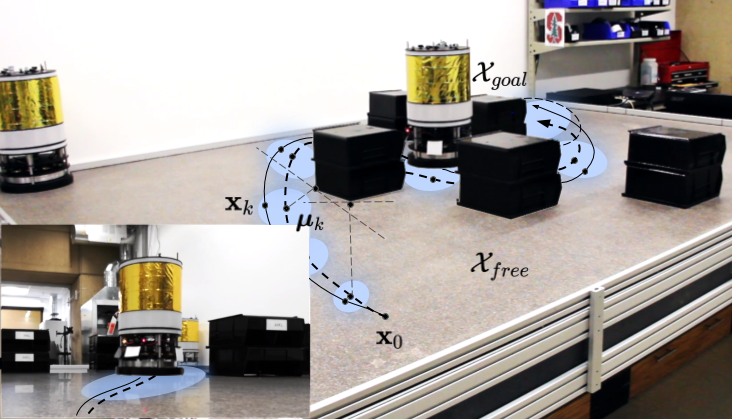
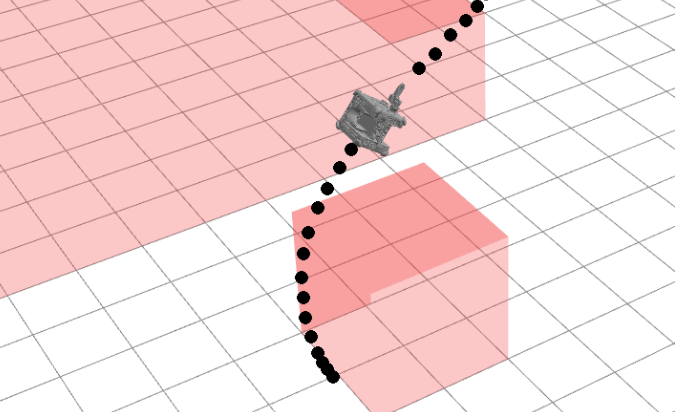
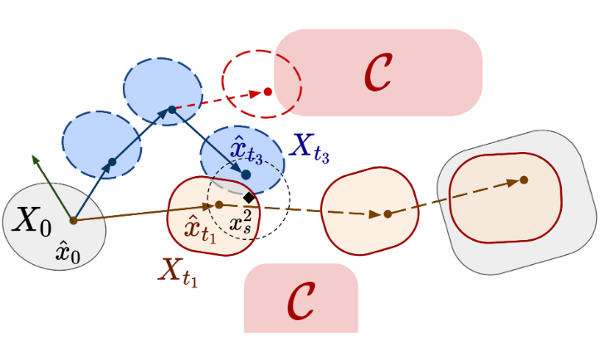 Robust-RRT: Probabilistically-Complete Motion Planning for Uncertain Nonlinear Systems - A. Wu, T. Lew, K. Solovey, E. Schmerling, M. Pavone - ISRR - 2022
Robust-RRT: Probabilistically-Complete Motion Planning for Uncertain Nonlinear Systems - A. Wu, T. Lew, K. Solovey, E. Schmerling, M. Pavone - ISRR - 2022 Project Page / Paper / Code - A robust sampling-based motion planning algorithm.
 A Simple and Efficient Sampling-based Algorithm for General Reachability Analysis - T. Lew, L. Janson, R. Bonalli, M. Pavone - L4DC - 2022
A Simple and Efficient Sampling-based Algorithm for General Reachability Analysis - T. Lew, L. Janson, R. Bonalli, M. Pavone - L4DC - 2022 Project Page / Paper / Code / Video - We analyze a sampling-based reachability analysis algorithm.
 Data-Driven Chance Constrained Control using Kernel Distribution Embeddings - A. J. Thorpe*, T. Lew*, M. M. K. Oishi, M. Pavone - L4DC - 2022
Data-Driven Chance Constrained Control using Kernel Distribution Embeddings - A. J. Thorpe*, T. Lew*, M. M. K. Oishi, M. Pavone - L4DC - 2022 Project Page / Paper / Code - We present a data-driven algorithm for efficiently computing stochastic control policies for general joint chance constrained optimal control problems.
 Analysis of theoretical and numerical properties of sequential convex programming for continuous-time optimal control - R. Bonalli, T. Lew, M. Pavone - TAC - 2022
Analysis of theoretical and numerical properties of sequential convex programming for continuous-time optimal control - R. Bonalli, T. Lew, M. Pavone - TAC - 2022 Project Page / Paper / Code - We analyze general SCP procedures for continuous-time optimal control.
 Safe Active Dynamics Learning and Control: A Sequential Exploration-Exploitation Framework - T. Lew, A. Sharma, J. Harrison, A. Bylard, M. Pavone - T-RO - 2022
Safe Active Dynamics Learning and Control: A Sequential Exploration-Exploitation Framework - T. Lew, A. Sharma, J. Harrison, A. Bylard, M. Pavone - T-RO - 2022 Project Page / Paper / Video / More Hardware Results - How can robots safely learn their dynamics?
 Nebula: Quest for robotic autonomy in challenging environments; team costar at the darpa subterranean challenge - A. Agha-mohammadi et al - JFR - 2022
Nebula: Quest for robotic autonomy in challenging environments; team costar at the darpa subterranean challenge - A. Agha-mohammadi et al - JFR - 2022 Project Page / Paper / CoSTAR-NeBula website - We present the algorithms, hardware, and software architecture deployed by the team CoSTAR in the DARPA SubT Challenge.
 Control Barrier Functions for Cyber-Physical Systems and Applications to NMPC - J. Schilliger, T. Lew, S. Richards, S. Hänggi, M. Pavone, C. Onder - RA-L - 2021
Control Barrier Functions for Cyber-Physical Systems and Applications to NMPC - J. Schilliger, T. Lew, S. Richards, S. Hänggi, M. Pavone, C. Onder - RA-L - 2021 Project Page / Paper - We propose a CBF formulation that accounts for delays.
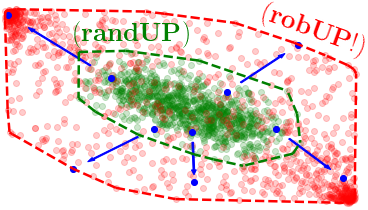 Sampling-based Reachability Analysis: A Random Set Theory Approach with Adversarial Sampling - T. Lew, M. Pavone - CoRL - 2020
Sampling-based Reachability Analysis: A Random Set Theory Approach with Adversarial Sampling - T. Lew, M. Pavone - CoRL - 2020 Project Page / Paper / Video / Code - New efficient sampling-based reachability analysis algorithms.
 Chance-Constrained Sequential Convex Programming for Robust Trajectory Optimization - T. Lew, R. Bonalli, M. Pavone - ECC - 2020
Chance-Constrained Sequential Convex Programming for Robust Trajectory Optimization - T. Lew, R. Bonalli, M. Pavone - ECC - 2020 Project Page / Paper / Code - We propose an algorithm for chance-constrained trajectory optimization.
 Learning-based warm-starting for fast sequential convex programming and trajectory optimization - S. Banerjee, T. Lew, R. Bonalli, A. Alfaadhel, I. Alomar, H. Shageer, M. Pavone - AeroConf - 2020
Learning-based warm-starting for fast sequential convex programming and trajectory optimization - S. Banerjee, T. Lew, R. Bonalli, A. Alfaadhel, I. Alomar, H. Shageer, M. Pavone - AeroConf - 2020 Project Page / Paper / Code - A learning-based strategy to warm-start trajectory optimization tools.
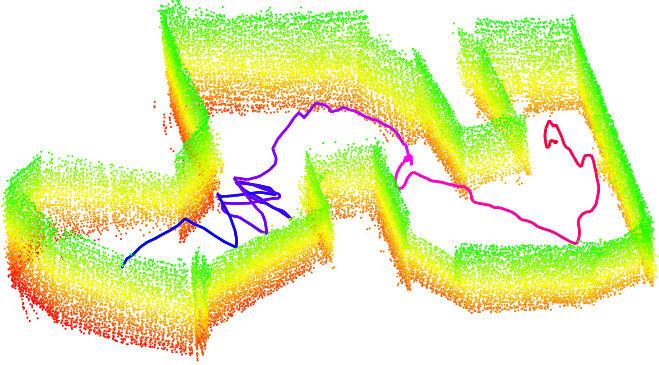 Contact Inertial Odometry: Collisions are your Friends - T. Lew*, T. Emmei*, D. Fan, T. Bartlett, A. Santamaria-Navarro, R. Thakker, A. Agha-mohammadi - ISRR - 2019
Contact Inertial Odometry: Collisions are your Friends - T. Lew*, T. Emmei*, D. Fan, T. Bartlett, A. Santamaria-Navarro, R. Thakker, A. Agha-mohammadi - ISRR - 2019 Project Page / Paper / Video - How can a drone fly blindly, when all its exteroceptive sensors have failed?
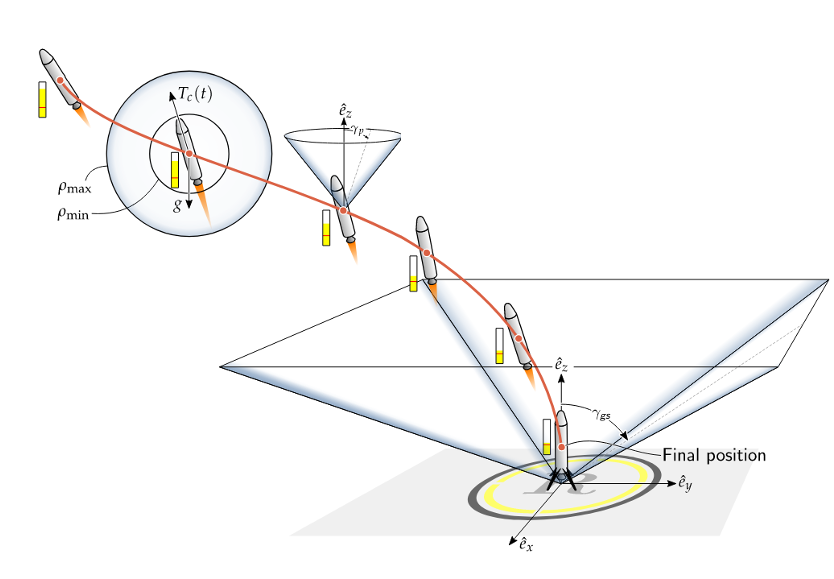
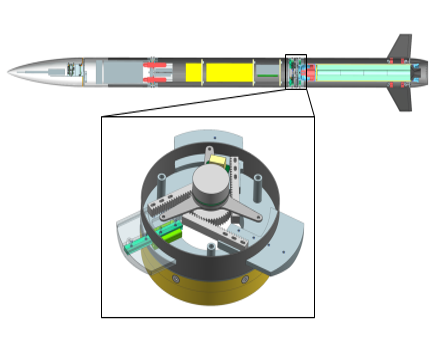 Chance-Constrained Optimal Altitude Control of a Rocket - T. Lew, F. Lyck, G. Müller - EUCASS - 2nd Best Student Paper Award in Flight Dynamics, GNC and Avionics - 2019
Chance-Constrained Optimal Altitude Control of a Rocket - T. Lew, F. Lyck, G. Müller - EUCASS - 2nd Best Student Paper Award in Flight Dynamics, GNC and Avionics - 2019 Project Page / Paper / Launch Video / ARIS website - We propose a control algorithm for a rocket to accurately reach a target apogee.
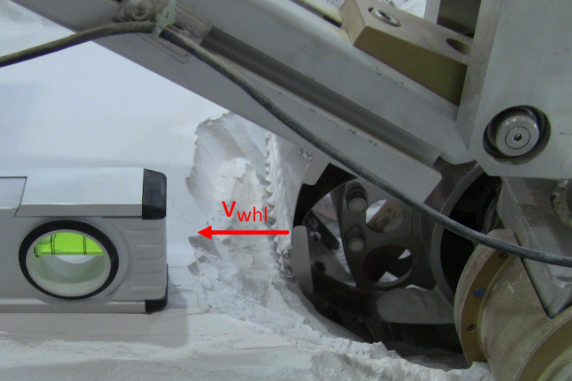 Investigation of specific wheel-terrain interaction aspects using an advanced single wheel test facility - P. Oettershagen, T. Lew, A. Tardy, S. Michaud - ASTRA - 2019
Investigation of specific wheel-terrain interaction aspects using an advanced single wheel test facility - P. Oettershagen, T. Lew, A. Tardy, S. Michaud - ASTRA - 2019 Project Page / Paper - We identify limitations of wheel-soil interaction models and present a new method.
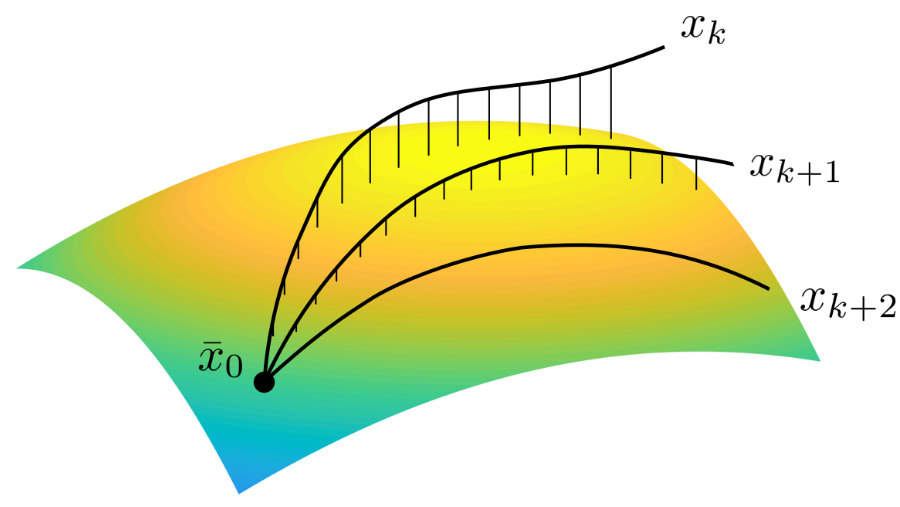 Trajectory optimization on manifolds: A theoretically-guaranteed embedded sequential convex programming approach - R. Bonalli, A. Bylard, A. Cauligi, T. Lew, M. Pavone - RSS - 2019
Trajectory optimization on manifolds: A theoretically-guaranteed embedded sequential convex programming approach - R. Bonalli, A. Bylard, A. Cauligi, T. Lew, M. Pavone - RSS - 2019 Project Page / Paper / Code - A new SCP trajectory optimization algorithm on manifolds.