 Vision-Conditioned Variational Bayesian Last Layer Dynamics Models - P. Brunzema, T. Lew, R. Zhang, T. Shirasawa, J. Subosits, M. Greiff - Under Review - 2026
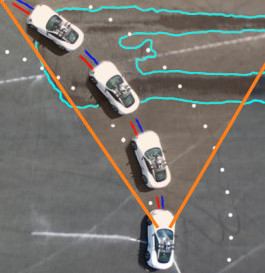
Vision-Conditioned Variational Bayesian Last Layer Dynamics Models - P. Brunzema, T. Lew, R. Zhang, T. Shirasawa, J. Subosits, M. Greiff - Under Review - 2026 Project Page / Paper / Video - A vision-conditioned dynamics model.
 Vision-Conditioned Variational Bayesian Last Layer Dynamics Models - P. Brunzema, T. Lew, R. Zhang, T. Shirasawa, J. Subosits, M. Greiff - Under Review - 2026
Vision-Conditioned Variational Bayesian Last Layer Dynamics Models - P. Brunzema, T. Lew, R. Zhang, T. Shirasawa, J. Subosits, M. Greiff - Under Review - 2026  Differentiable Model Predictive Control on the GPU - E. Adabag, M. Greiff, J. Subosits, T. Lew - ICLR - 2026
Differentiable Model Predictive Control on the GPU - E. Adabag, M. Greiff, J. Subosits, T. Lew - ICLR - 2026  Convex Hulls of Reachable Sets - T. Lew, R. Bonalli, M. Pavone - TAC - 2025
Convex Hulls of Reachable Sets - T. Lew, R. Bonalli, M. Pavone - TAC - 2025  Rough Stochastic Pontryagin Maximum Principle and an Indirect Shooting Method - T. Lew - SICON - 2025
Rough Stochastic Pontryagin Maximum Principle and an Indirect Shooting Method - T. Lew - SICON - 2025  First, Learn What You Don’t Know: Active Information Gathering for Driving at the Limits of Handling - A. Davydov, F. Djeumou, M. Greiff, M. Suminaka, M. Thompson, J. Subosits, T. Lew - RA-L - 2025
First, Learn What You Don’t Know: Active Information Gathering for Driving at the Limits of Handling - A. Davydov, F. Djeumou, M. Greiff, M. Suminaka, M. Thompson, J. Subosits, T. Lew - RA-L - 2025 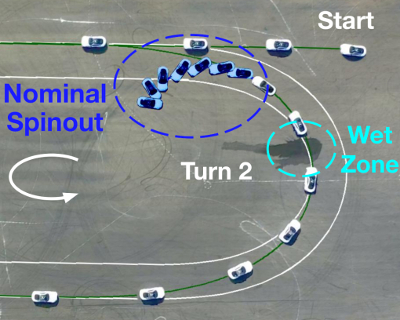 Risk-Averse Model Predictive Control for Racing in Adverse Conditions - T. Lew, M. Greiff, F. Djeumou, M. Suminaka, M. Thompson, J. Subosits, - ICRA - 2025
Risk-Averse Model Predictive Control for Racing in Adverse Conditions - T. Lew, M. Greiff, F. Djeumou, M. Suminaka, M. Thompson, J. Subosits, - ICRA - 2025  One Model to Drift Them All: Physics-Informed Conditional Diffusion Model for Driving at the Limits - F. Djeumou, T. Lew, N. Ding, M. Thompson, M. Suminaka, M. Greiff, J. Subosits - CoRL - Outstanding Paper Award - 2024
One Model to Drift Them All: Physics-Informed Conditional Diffusion Model for Driving at the Limits - F. Djeumou, T. Lew, N. Ding, M. Thompson, M. Suminaka, M. Greiff, J. Subosits - CoRL - Outstanding Paper Award - 2024 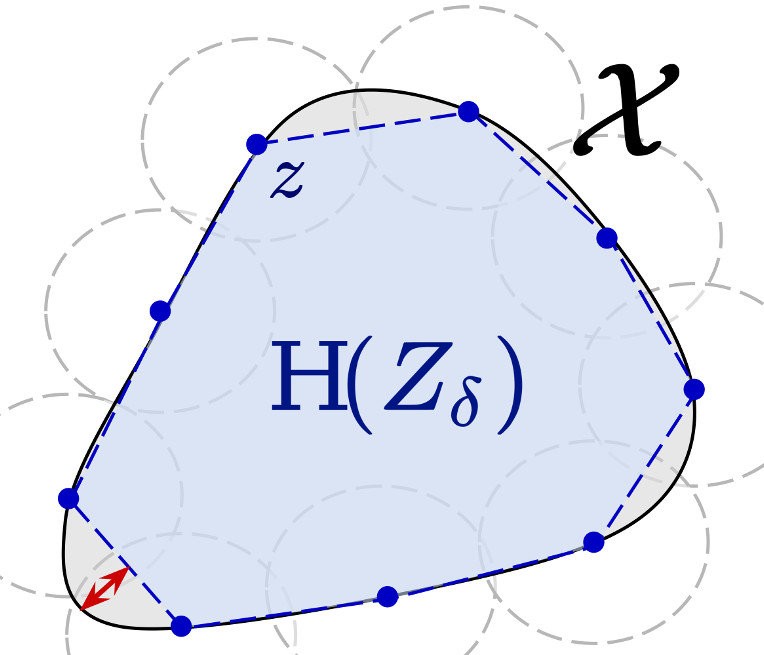 Estimating the Convex Hull of the Image of a Set with Smooth Boundary: Error Bounds and Applications - T. Lew, R. Bonalli, L. Janson, M. Pavone - DCG - 2024
Estimating the Convex Hull of the Image of a Set with Smooth Boundary: Error Bounds and Applications - T. Lew, R. Bonalli, L. Janson, M. Pavone - DCG - 2024 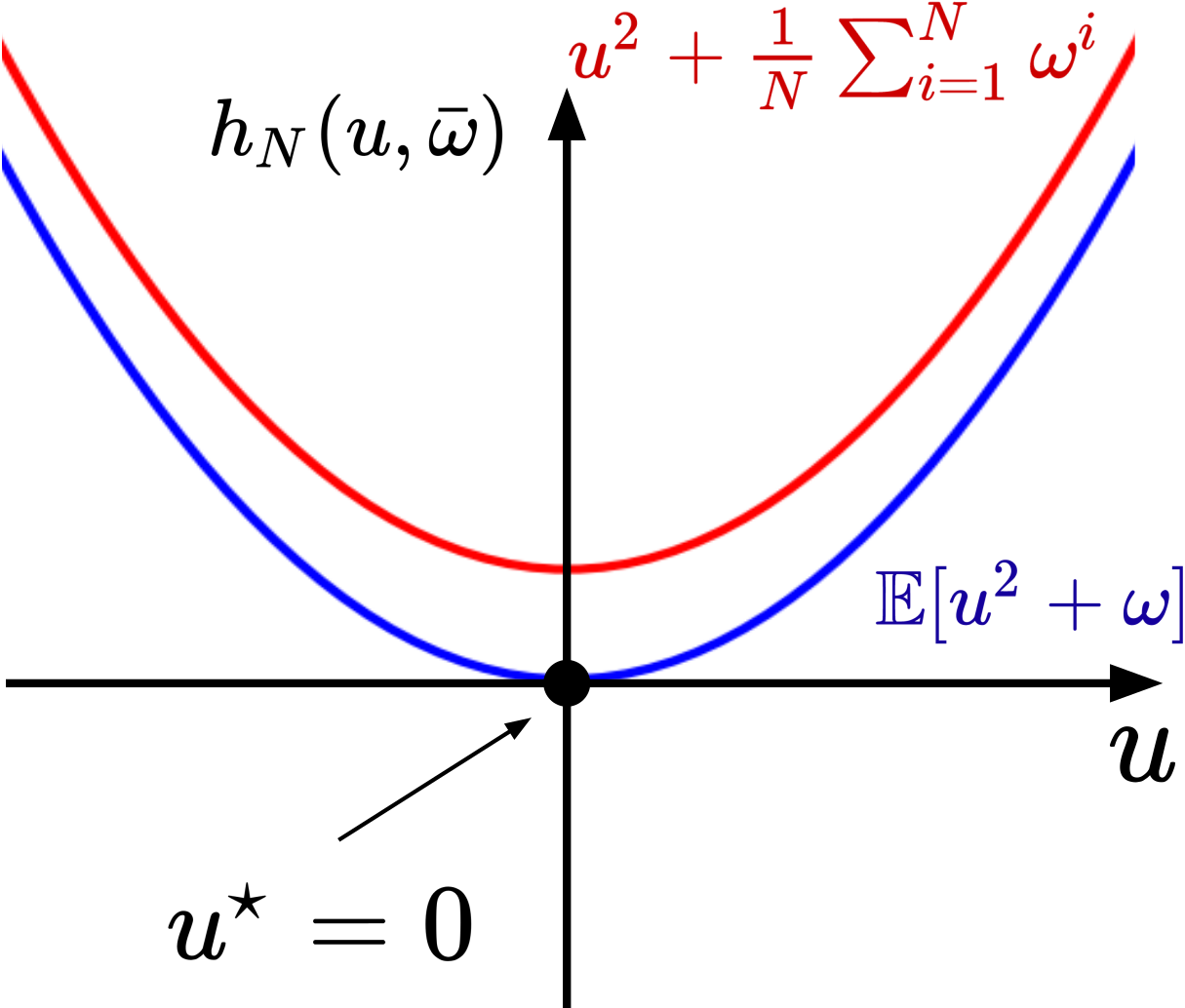 Sample Average Approximation for Stochastic Programming with Equality Constraints - T. Lew, R. Bonalli, M. Pavone - SIOPT - 2024
Sample Average Approximation for Stochastic Programming with Equality Constraints - T. Lew, R. Bonalli, M. Pavone - SIOPT - 2024 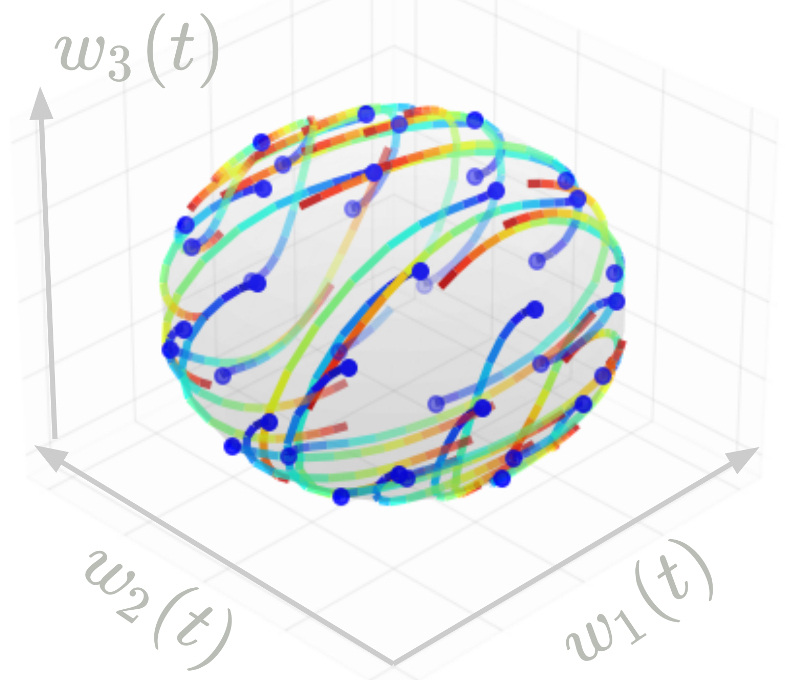 Exact Characterization of the Convex Hulls of Reachable Sets - T. Lew, R. Bonalli, M. Pavone - CDC - Outstanding Student Paper Award - 2023
Exact Characterization of the Convex Hulls of Reachable Sets - T. Lew, R. Bonalli, M. Pavone - CDC - Outstanding Student Paper Award - 2023 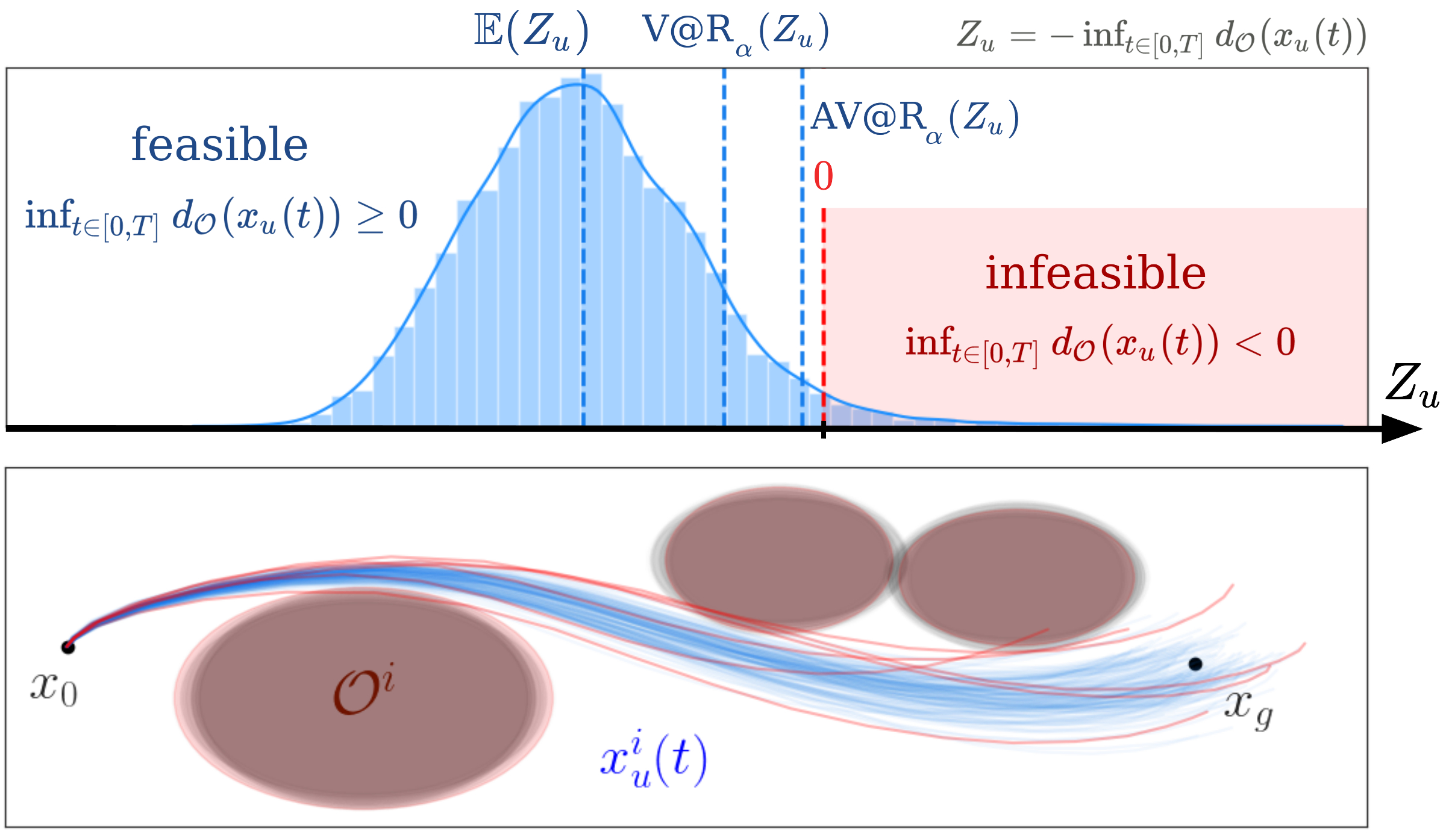 Risk-Averse Trajectory Optimization via Sample Average Approximation - T. Lew, R. Bonalli, M. Pavone - RA-L - 2023
Risk-Averse Trajectory Optimization via Sample Average Approximation - T. Lew, R. Bonalli, M. Pavone - RA-L - 2023  Robotic Table Wiping via Reinforcement Learning and Whole-body Trajectory Optimization - T. Lew, S. Singh, M. Prats, J. Bingham, J. Weisz, B. Holson, X. Zhang, V. Sindhwani, Y. Lu, F. Xia, P. Xu, T. Zhang, J. Tan, M. Gonzalez - ICRA - 2023
Robotic Table Wiping via Reinforcement Learning and Whole-body Trajectory Optimization - T. Lew, S. Singh, M. Prats, J. Bingham, J. Weisz, B. Holson, X. Zhang, V. Sindhwani, Y. Lu, F. Xia, P. Xu, T. Zhang, J. Tan, M. Gonzalez - ICRA - 2023  Sequential convex programming for non-linear stochastic optimal control - R. Bonalli, T. Lew, M. Pavone - ESAIM: COCV - 2022
Sequential convex programming for non-linear stochastic optimal control - R. Bonalli, T. Lew, M. Pavone - ESAIM: COCV - 2022 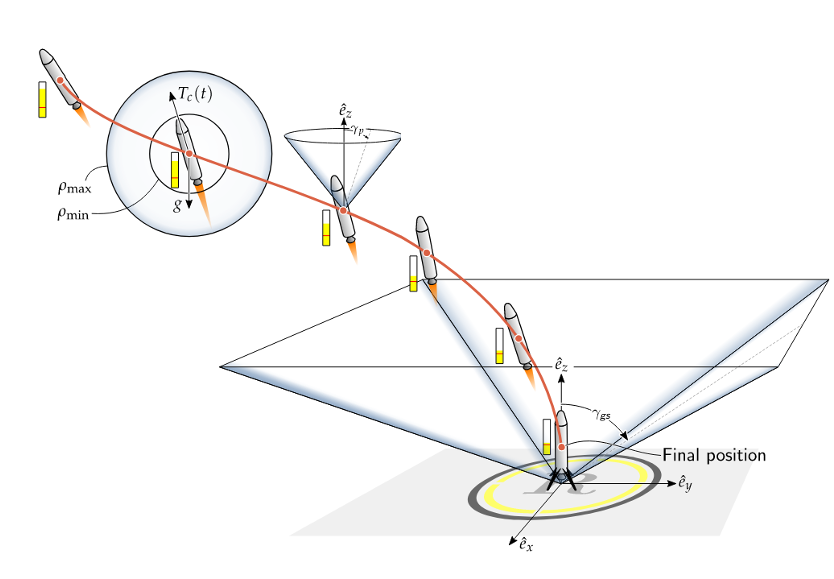 Convex Optimization for Trajectory Generation: A Tutorial on Generating Dynamically Feasible Trajectories Reliably and Efficiently - D. Malyuta, T. Reynolds, M. Szmuk, T. Lew, R. Bonalli, M. Pavone, B. Açıkmeşe - CSM - Outstanding Paper Award - 2022
Convex Optimization for Trajectory Generation: A Tutorial on Generating Dynamically Feasible Trajectories Reliably and Efficiently - D. Malyuta, T. Reynolds, M. Szmuk, T. Lew, R. Bonalli, M. Pavone, B. Açıkmeşe - CSM - Outstanding Paper Award - 2022 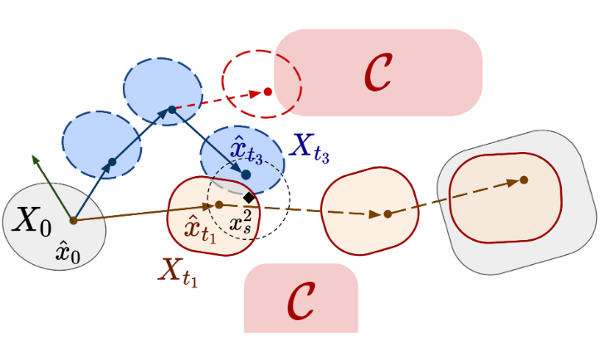 Robust-RRT: Probabilistically-Complete Motion Planning for Uncertain Nonlinear Systems - A. Wu, T. Lew, K. Solovey, E. Schmerling, M. Pavone - ISRR - 2022
Robust-RRT: Probabilistically-Complete Motion Planning for Uncertain Nonlinear Systems - A. Wu, T. Lew, K. Solovey, E. Schmerling, M. Pavone - ISRR - 2022 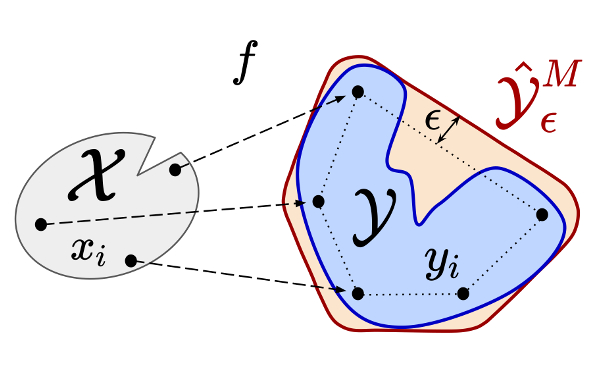 A Simple and Efficient Sampling-based Algorithm for General Reachability Analysis - T. Lew, L. Janson, R. Bonalli, M. Pavone - L4DC - 2022
A Simple and Efficient Sampling-based Algorithm for General Reachability Analysis - T. Lew, L. Janson, R. Bonalli, M. Pavone - L4DC - 2022 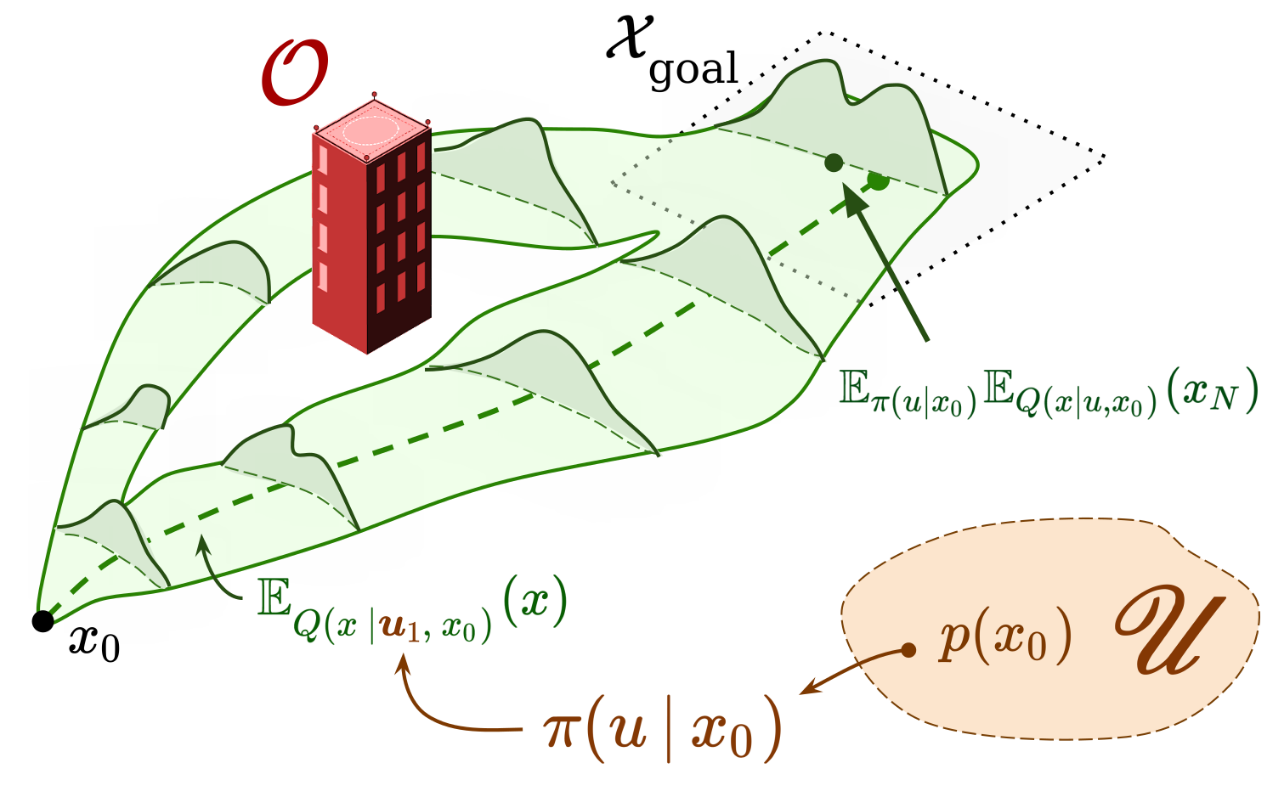 Data-Driven Chance Constrained Control using Kernel Distribution Embeddings - A. J. Thorpe*, T. Lew*, M. M. K. Oishi, M. Pavone - L4DC - 2022
Data-Driven Chance Constrained Control using Kernel Distribution Embeddings - A. J. Thorpe*, T. Lew*, M. M. K. Oishi, M. Pavone - L4DC - 2022  Analysis of theoretical and numerical properties of sequential convex programming for continuous-time optimal control - R. Bonalli, T. Lew, M. Pavone - TAC - 2022
Analysis of theoretical and numerical properties of sequential convex programming for continuous-time optimal control - R. Bonalli, T. Lew, M. Pavone - TAC - 2022  Safe Active Dynamics Learning and Control: A Sequential Exploration-Exploitation Framework - T. Lew, A. Sharma, J. Harrison, A. Bylard, M. Pavone - T-RO - 2022
Safe Active Dynamics Learning and Control: A Sequential Exploration-Exploitation Framework - T. Lew, A. Sharma, J. Harrison, A. Bylard, M. Pavone - T-RO - 2022  Nebula: Quest for robotic autonomy in challenging environments; team costar at the darpa subterranean challenge - A. Agha-mohammadi et al - JFR - 2022
Nebula: Quest for robotic autonomy in challenging environments; team costar at the darpa subterranean challenge - A. Agha-mohammadi et al - JFR - 2022  Control Barrier Functions for Cyber-Physical Systems and Applications to NMPC - J. Schilliger, T. Lew, S. Richards, S. Hänggi, M. Pavone, C. Onder - RA-L - 2021
Control Barrier Functions for Cyber-Physical Systems and Applications to NMPC - J. Schilliger, T. Lew, S. Richards, S. Hänggi, M. Pavone, C. Onder - RA-L - 2021  Sampling-based Reachability Analysis: A Random Set Theory Approach with Adversarial Sampling - T. Lew, M. Pavone - CoRL - 2020
Sampling-based Reachability Analysis: A Random Set Theory Approach with Adversarial Sampling - T. Lew, M. Pavone - CoRL - 2020 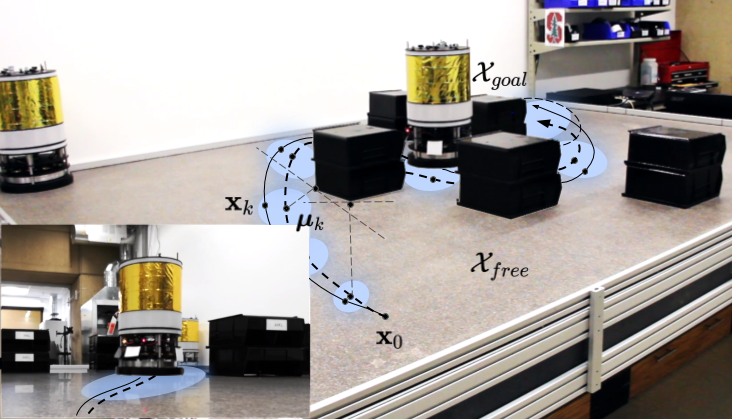 Chance-Constrained Sequential Convex Programming for Robust Trajectory Optimization - T. Lew, R. Bonalli, M. Pavone - ECC - 2020
Chance-Constrained Sequential Convex Programming for Robust Trajectory Optimization - T. Lew, R. Bonalli, M. Pavone - ECC - 2020  Learning-based warm-starting for fast sequential convex programming and trajectory optimization - S. Banerjee, T. Lew, R. Bonalli, A. Alfaadhel, I. Alomar, H. Shageer, M. Pavone - AeroConf - 2020
Learning-based warm-starting for fast sequential convex programming and trajectory optimization - S. Banerjee, T. Lew, R. Bonalli, A. Alfaadhel, I. Alomar, H. Shageer, M. Pavone - AeroConf - 2020  Contact Inertial Odometry: Collisions are your Friends - T. Lew*, T. Emmei*, D. Fan, T. Bartlett, A. Santamaria-Navarro, R. Thakker, A. Agha-mohammadi - ISRR - 2019
Contact Inertial Odometry: Collisions are your Friends - T. Lew*, T. Emmei*, D. Fan, T. Bartlett, A. Santamaria-Navarro, R. Thakker, A. Agha-mohammadi - ISRR - 2019  Chance-Constrained Optimal Altitude Control of a Rocket - T. Lew, F. Lyck, G. Müller - EUCASS - 2nd Best Student Paper Award in Flight Dynamics, GNC and Avionics - 2019
Chance-Constrained Optimal Altitude Control of a Rocket - T. Lew, F. Lyck, G. Müller - EUCASS - 2nd Best Student Paper Award in Flight Dynamics, GNC and Avionics - 2019 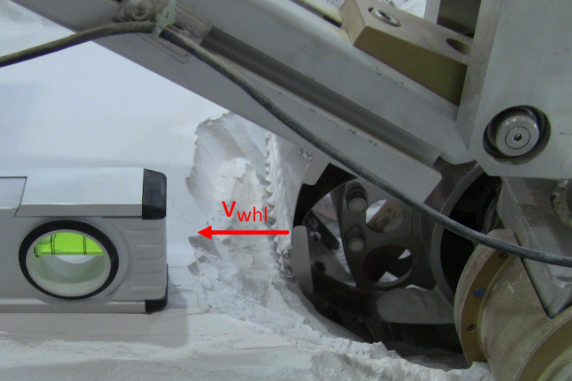 Investigation of specific wheel-terrain interaction aspects using an advanced single wheel test facility - P. Oettershagen, T. Lew, A. Tardy, S. Michaud - ASTRA - 2019
Investigation of specific wheel-terrain interaction aspects using an advanced single wheel test facility - P. Oettershagen, T. Lew, A. Tardy, S. Michaud - ASTRA - 2019  Trajectory optimization on manifolds: A theoretically-guaranteed embedded sequential convex programming approach - R. Bonalli, A. Bylard, A. Cauligi, T. Lew, M. Pavone - RSS - 2019
Trajectory optimization on manifolds: A theoretically-guaranteed embedded sequential convex programming approach - R. Bonalli, A. Bylard, A. Cauligi, T. Lew, M. Pavone - RSS - 2019 - <b>ICLR</b>
<!--
</b>
- <i>E. Adabag, M. Greiff, J. Subosits, T. Lew</i>
- <b>ICLR</b>-->
- 2026 <!-- - January 26, 2026. -->
<span class="archive__item-excerpt">
<br /> <a href="/publication/diffmpc">Project Page</a> / <a href="https://arxiv.org/abs/2510.06179">Paper</a> / <a href="https://github.com/ToyotaResearchInstitute/diffmpc">Code</a> / <a href="https://www.youtube.com/watch?v=r42iJBw-L4E">Video</a> - Scaling up differentiable optimization on the GPU.
</span>
</div>
</article> </div>
Convex Hulls of Reachable Sets - T. Lew, R. Bonalli, M. Pavone - TAC - 2025 Rough Stochastic Pontryagin Maximum Principle and an Indirect Shooting Method - T. Lew - SICON - 2025 First, Learn What You Don’t Know: Active Information Gathering for Driving at the Limits of Handling - A. Davydov, F. Djeumou, M. Greiff, M. Suminaka, M. Thompson, J. Subosits, T. Lew - RA-L - 2025 Risk-Averse Model Predictive Control for Racing in Adverse Conditions - T. Lew, M. Greiff, F. Djeumou, M. Suminaka, M. Thompson, J. Subosits, - ICRA - 2025 One Model to Drift Them All: Physics-Informed Conditional Diffusion Model for Driving at the Limits - F. Djeumou, T. Lew, N. Ding, M. Thompson, M. Suminaka, M. Greiff, J. Subosits - CoRL - Outstanding Paper Award - 2024 Estimating the Convex Hull of the Image of a Set with Smooth Boundary: Error Bounds and Applications - T. Lew, R. Bonalli, L. Janson, M. Pavone - DCG - 2024 Sample Average Approximation for Stochastic Programming with Equality Constraints - T. Lew, R. Bonalli, M. Pavone - SIOPT - 2024 Exact Characterization of the Convex Hulls of Reachable Sets - T. Lew, R. Bonalli, M. Pavone - CDC - Outstanding Student Paper Award - 2023 Risk-Averse Trajectory Optimization via Sample Average Approximation - T. Lew, R. Bonalli, M. Pavone - RA-L - 2023 Robotic Table Wiping via Reinforcement Learning and Whole-body Trajectory Optimization - T. Lew, S. Singh, M. Prats, J. Bingham, J. Weisz, B. Holson, X. Zhang, V. Sindhwani, Y. Lu, F. Xia, P. Xu, T. Zhang, J. Tan, M. Gonzalez - ICRA - 2023 Sequential convex programming for non-linear stochastic optimal control - R. Bonalli, T. Lew, M. Pavone - ESAIM: COCV - 2022 Convex Optimization for Trajectory Generation: A Tutorial on Generating Dynamically Feasible Trajectories Reliably and Efficiently - D. Malyuta, T. Reynolds, M. Szmuk, T. Lew, R. Bonalli, M. Pavone, B. Açıkmeşe - CSM - Outstanding Paper Award - 2022 Robust-RRT: Probabilistically-Complete Motion Planning for Uncertain Nonlinear Systems - A. Wu, T. Lew, K. Solovey, E. Schmerling, M. Pavone - ISRR - 2022 A Simple and Efficient Sampling-based Algorithm for General Reachability Analysis - T. Lew, L. Janson, R. Bonalli, M. Pavone - L4DC - 2022 Data-Driven Chance Constrained Control using Kernel Distribution Embeddings - A. J. Thorpe*, T. Lew*, M. M. K. Oishi, M. Pavone - L4DC - 2022 Analysis of theoretical and numerical properties of sequential convex programming for continuous-time optimal control - R. Bonalli, T. Lew, M. Pavone - TAC - 2022 Safe Active Dynamics Learning and Control: A Sequential Exploration-Exploitation Framework - T. Lew, A. Sharma, J. Harrison, A. Bylard, M. Pavone - T-RO - 2022 Nebula: Quest for robotic autonomy in challenging environments; team costar at the darpa subterranean challenge - A. Agha-mohammadi et al - JFR - 2022 Control Barrier Functions for Cyber-Physical Systems and Applications to NMPC - J. Schilliger, T. Lew, S. Richards, S. Hänggi, M. Pavone, C. Onder - RA-L - 2021 Sampling-based Reachability Analysis: A Random Set Theory Approach with Adversarial Sampling - T. Lew, M. Pavone - CoRL - 2020 Chance-Constrained Sequential Convex Programming for Robust Trajectory Optimization - T. Lew, R. Bonalli, M. Pavone - ECC - 2020 Learning-based warm-starting for fast sequential convex programming and trajectory optimization - S. Banerjee, T. Lew, R. Bonalli, A. Alfaadhel, I. Alomar, H. Shageer, M. Pavone - AeroConf - 2020 Contact Inertial Odometry: Collisions are your Friends - T. Lew*, T. Emmei*, D. Fan, T. Bartlett, A. Santamaria-Navarro, R. Thakker, A. Agha-mohammadi - ISRR - 2019 Chance-Constrained Optimal Altitude Control of a Rocket - T. Lew, F. Lyck, G. Müller - EUCASS - 2nd Best Student Paper Award in Flight Dynamics, GNC and Avionics - 2019 Investigation of specific wheel-terrain interaction aspects using an advanced single wheel test facility - P. Oettershagen, T. Lew, A. Tardy, S. Michaud - ASTRA - 2019 Trajectory optimization on manifolds: A theoretically-guaranteed embedded sequential convex programming approach - R. Bonalli, A. Bylard, A. Cauligi, T. Lew, M. Pavone - RSS - 2019 –>